|
|
|
| HOME > 研究内容 > 過去の研究 |
|
|
|||||||
|
ここ20年来継続している半導体の高密度化から,また,近年ではナノテクノロジーへの関心の高まりなどから,微細な加工及び観察技術への要求は永続的に続いており,現在要求される加工分解能は1桁ナノメータのオーダに完全に突入している.このような高精度・高分解能な加工にはクリーンさらには高真空環境が必要とされることが多く,そのような環境下での物体ハンドリングの必要性が高まってきている.周知の通り,大気中のメカトロニクスは非常に進歩している.例えば精密位置決めを例に挙げれば,すでに細線間隔が0.1μmより小さい露光精度を目指されており,実験室レベルの装置では数nmオーダの位置決めが実現されている.一方真空中では,材料の制限(低ガス放出性,耐熱性),大きな摩擦,速い摩耗などに加えて,荷電粒子ビームを使う用途では,磁気の使用の制限などから,大気中で使用できるような高性能なモータ,センサなどの要素技術をそのまま真空容器内に持ち込むことができない.新野研究室では,このような物理的特殊環境に対応したメカトロニクス要素技術の創出を目標に研究を行った. 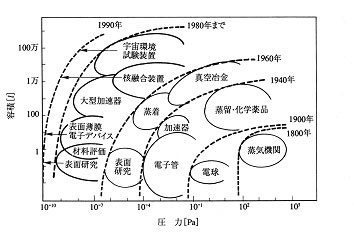
図1 必要とされる真空度の変遷
|