微小位置決めや,高速駆動を行おうとした場合,潤滑はその可否を決定する大きな要因のひとつとなりうる.真空中のメカトロニクスでは容器内気体圧力を下げる必要から樹脂や潤滑油が使えず潤滑が困難である上に金属どうしの摩擦と摩耗が大気中に比べて大きくなることが深刻な障害としてつきまとう.この問題の解決に浮上制御技術を利用することは合理的であり,実際,真空中で数万rpmの回転数を必要とするターボ分子ポンプでは,潤滑機構として磁気軸受が広く利用されている.しかしながら,EB加工装置や電子顕微鏡など,荷電粒子ビームの精密な制御が必要な装置では,ビーム直近での磁場の漏洩はもちろんのこと,磁性体の使用すら制限される.新野研究室では磁場に比べて遮蔽が容易であり,また,磁性体を必要としない静電浮上の利用を提案している.
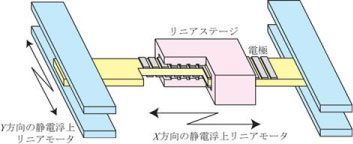
図1 目標とする静電浮上テーブル

大気中の静電力は磁気力に比べて非常に弱く,このような力でテーブルなどの重量物が浮上できるかどうかと言う懸念がある.大気中で静電力が弱いのは空気の絶縁破壊により発生可能な電場が制限されるからである.一方真空中では,絶縁破壊電場が大気中の約27倍の80MV/m以上になり,破壊電場におけるマクスウエル応力(主成分)は280kN/m2(285gf/cm2)になる.このことは,厚さ1m以上のアルミ板の浮上が可能であることを示しており,浮上装置への利用が期待できる.
静電浮上の基本的な原理は図2のとおりである.平板状の電極2枚の直下に導電性の平板を配置し,電極間に電位差を与えると,平板状の各電極と対向する部位に電極とは反対極性の電荷が誘導され,電極に誘導された電荷との間に吸引のクーロン力が発生する.この力により浮上体には重力に拮抗する浮上力が与えられる.浮上ギャップを計測し,印加電圧を制御することにより,浮上体を目標の位置で浮上させる.
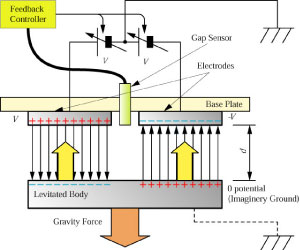
図2 浮上原理
これまでに,10-6Pa真空環境下で,直径100mm,厚さ20mm,質量442gのアルミ円板を浮上ギャップ200mmで浮上することに成功した(図3).

図3 浮上装置外観(大気中で撮影)

ここまでの研究では,円板をその場で浮上させることで真空中静電浮上技術の基礎的研究を行い,静電浮上そのものの有効性はある程度示された.これまで使用してきた浮上システムは浮上体である円板が持つ6つの自由度のうち,鉛直軸周りの回転以外の全ての自由度を能動的もしくは受動的に拘束するものであった(図4).
図4 円板の浮上システム(非拘束自由度は鉛直軸周りの回転)
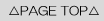
このシステムは浮上基礎実験には適しているが,搬送装置や位置決めテーブルの浮上には適していない.このような装置のための浮上機構として,水平面内の並進1方向に非拘束自由度を持つ浮上電極構造を試作した(図5 静電レール).
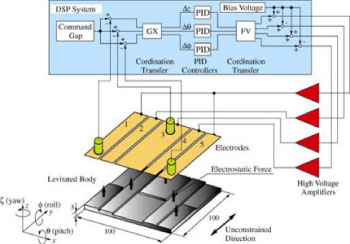
図5 静電レール
次に,静電レール用の浮上体の下面にガラス板を貼り付け,さらにその下に3相に接続された櫛歯上平行電極を配置して駆動誘導電荷形静電モータの原理を利用して完全非磁性かつ非接触で浮上体を駆動する装置を試作し,駆動ことに成功した(図6).

図6 静電レール浮上装置
実際の駆動の様子を示す。表示されない場合はこちら。