|
|
|
| HOME > 研究内容 > 高真空中のメカトロニクス > 超音波モータを利用した超高真空対応回転導入器の研究 |
|
|
||
|
|
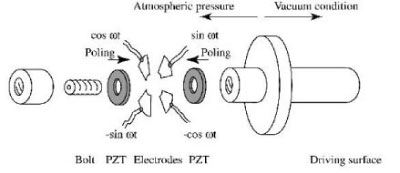
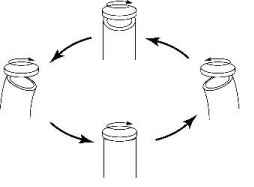 図4 モード回転型超音波モータ |
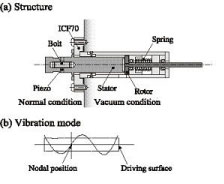 図5 振動モード |
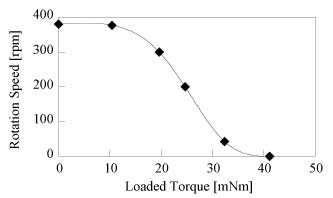
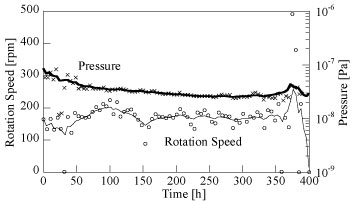
試作超音波モータ回転導入機で得られた性能は以下の通りである.回転導入器の出力を磁気カップリング式回転導入器を介して,真空容器外へ取り出して動力性能を測定した結果を図 6に示す.駆動条件は電圧800[Vp-p],駆動周波数32.3[kHz],回転子の固定子への押しつけ力(予圧)は11.7Nとした.試験は本回転導入器を容器を装着した状態で200℃48時間のベーク処理を施し,容器内気体圧力を4x10-8Paまで排気してから行った.200℃ベーク処理を行い真空容器内圧力が3.0×10-8Paに達してから連続駆動試験を開始した.予圧は11.7Nとし,駆動周波数は31.96〜32.37kHzで回転数が最大になるように調整し,印加電圧は回転数が150rpmとなるように,480〜800Vp-pで調整した.駆動中の回転速度と真空容器内圧力を図 7に示す.平均150rpmで400時間の駆動に成功した.
実際の駆動の様子を示す。表示されない場合はこちら。
これまでの研究の結果,摩擦駆動である超音波モータを利用しても10-8Paオーダの超高真空を維持したままメカトロオペレーションを実現可能であることがあることがわかった.従来,超高真空環境中の超音波モータは非常に小さな試料の微小位置決めなど,軽負荷の用途に限られてきたが,テーブルを駆動するなどの重負荷にも対応できる可能性が見えてきたことが本研究のこれまでに得られた最大の成果である.今後は寿命のさらなる延長を目指しつつ,制御などメカトロアクチュエータとして必要になる用件を一つずつ満たしていくための開発研究を行っていく予定である.
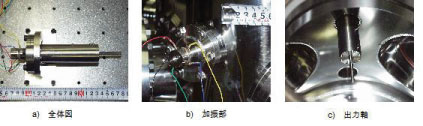
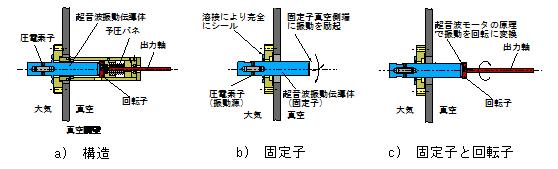 図1 超音波モータを利用した回転導入器
図1 超音波モータを利用した回転導入器